Washout滤波器作为一种高通滤波器,具有保持原系统平衡点位置不变的优点,被广泛用于工业领域.本研究基于Washout滤波器对系统设计非线性控制器进行Hopf分岔控制.这里,引入新变量w并对系统(1)进行Hopf分岔控制,对原系统施加控制u并构建受控系统为
其中,滤波器常数m>0; u为控制器,
u=k1(x-mw)+k2(x-mw)3(10)
这里, k1和k2为控制增益.由式(10)可见,新增变量w和控制u不改变原系统平衡点的位置.保持其他参数不变,以a为分岔参数,研究与D对应的平衡点D'(3.537, -1.974, -1.791, 3.537/m)的Hopf分岔.调整受控参数k1与m可改变分岔参数的临界值,实现分岔在预期位置发生.调整受控参数k2能够改变系统分岔解的稳定性与分岔方向.以下将基于高维分岔理论来分析控制器的有效性和合理性.
在平衡点D'处对受控系统线性化,得到系数矩阵的特征方程为
h4λ4+h3λ3+h2λ2+h1λ+h0=0(11)
其中, h0=73.025 3am; h1=73.025 3a+8.952 6k1-8.952 6m+1.102am; h2=1.102a+am-8.952 6; h3=a-k1+m; h4=1. 由高维分岔理论可知,此时若要受控系统发生Hopf分岔,则参数需满足式(12)和式(13).

其中, g0=1.102+m; g1=73.025 3+1.102m; g2=73.025 3m; g3=a-k1+m; g4=1.102a-8.952 63+am; g5=73.025 3a+8.952(k1-m)+1.102am; a=a0, m=m0和k1=k0是满足式(12)中的解; iv0是式(11)在参数a0, m和k0下的一个纯虚特征根.
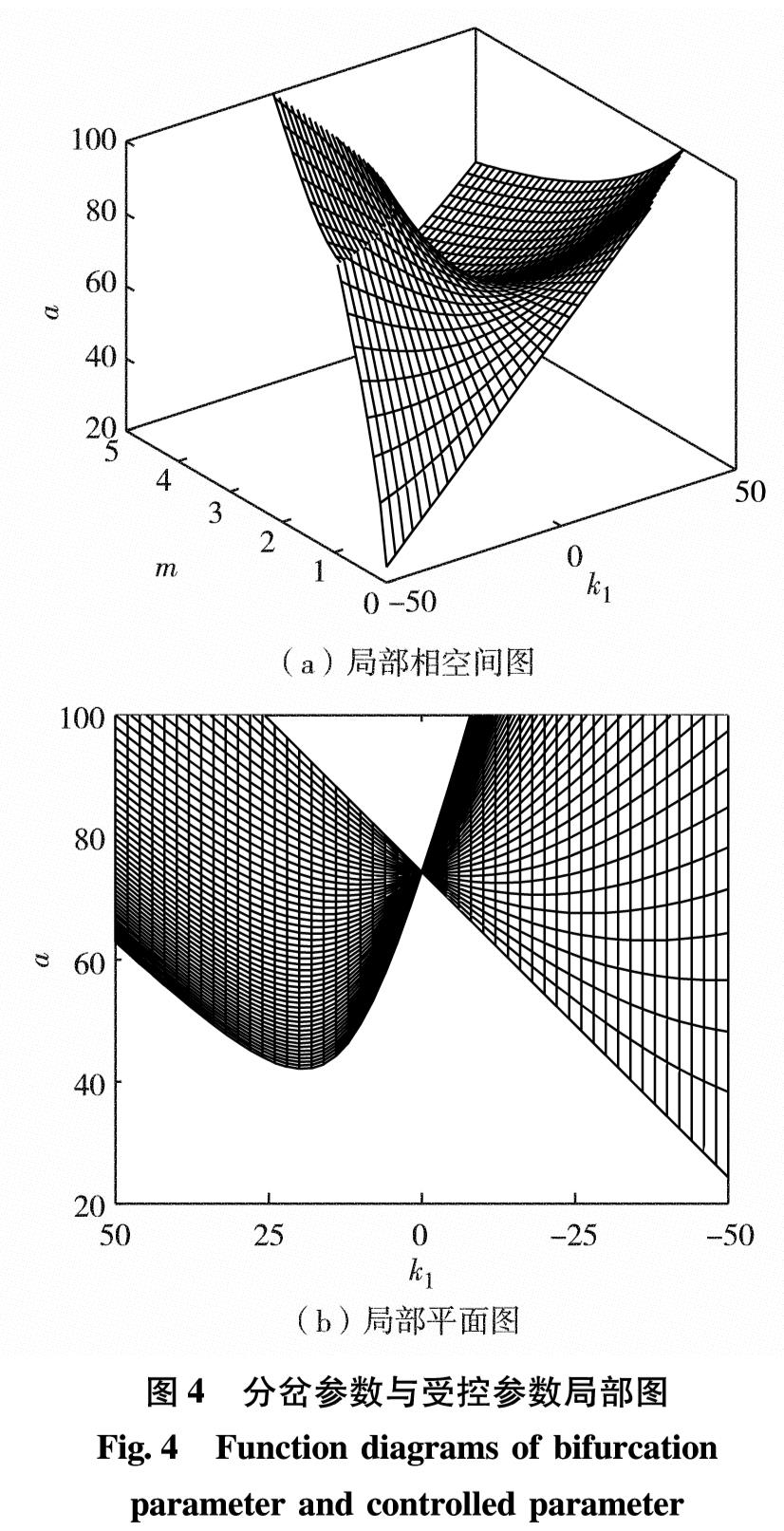
式(12)和式(13)表明,Hopf分岔参数的临界值仅与受控参数k1和m有关,即可通过调整受控参数k1和m来实现Hopf分岔在指定位置产生.为便于确定受控参数值,可先找出满足式(12)的值,再代入式(13)验证.考虑到参数a>0, m>0, 取a∈(0, 250], m∈(0, 5], k1∈(50, 50], 由式(13)绘制出符合其条件的分岔参数a和受控参数k1和m的局部曲面图和平面图,如图4.
图4 分岔参数与受控参数局部图
Fig.4 Function diagrams of bifurcation parameter and controlled parameter
图4中曲面上的任意一点都满足式(12),一般来说,在这个曲面上可以找到实现指定位置a处发生Hopf分岔的受控参数值k1和m. 继续增大k1的变化区间,可在更大的范围内调整系统的分岔临界值.表1给出了曲面上实现Hopf分岔提前和延后,且满足横截性条件式(13)的任意各一组值.
表1 参数a, k1和m的取值
Table 1 Values of parameters of a, k1 and m
a k
1 m v
0 λ'(a)70 -5.659 0.200 0 8.180 1 -0.006 7+0.005 7i80 -10.000 1.359 6 8.009 8 -0.005 5+0.006 6i
进一步分析受控参数k2对受控系统分岔的方向、临界性、极限环稳定性和幅值影响.据表1选择Hopf分岔临界值a=80来研究,对比原系统可知Hopf分岔推迟.此时,受控系统在平衡点D'的特征方程(11)有一对纯虚特征根λ21=λ22=±v0i=±8.009 8i和两个负实根λ23=-1.376 1, λ24=-89.983 5. 求出λ21,λ23和λ24所对应的特征向量分别为 v21=[1, -0.286 4-0.305 8i, -0.308 2+0.216 3, 0.020 6-0.121 4]T, v23=[1, -2.420 8, -3.575 3, -60.530 5]T, v24=[1, -0.028 5, 0.024 8, -0.011 3]T. 那么,对系统作如下变换
X=xD'+PZ(14)
其中, X=[x, y, z, w]T; Z=[z1, z2, z3, z4]T; xD'=[3.537, -1.974, -1.791, 3.537/1.359 6]T; P=[Re(v21), -Im(v21), v23, v24]. 因此,可得受控系统的规范形为

其中, fi(zi, k2)为非线性函数,其表达式过于繁琐故此处不予列出.由式(15)可求出相关的必要特征量为
根据式(1)至式(28)和表1,可求出判断受控系统Hopf分岔解的稳定性指标β2和分岔方向指标μ2分别为
μ2=-Re(C)/φ'=5.321 8k2-0.375 8(30)
β2=-2μ2φ'=0.059k2-0.004 2(31)
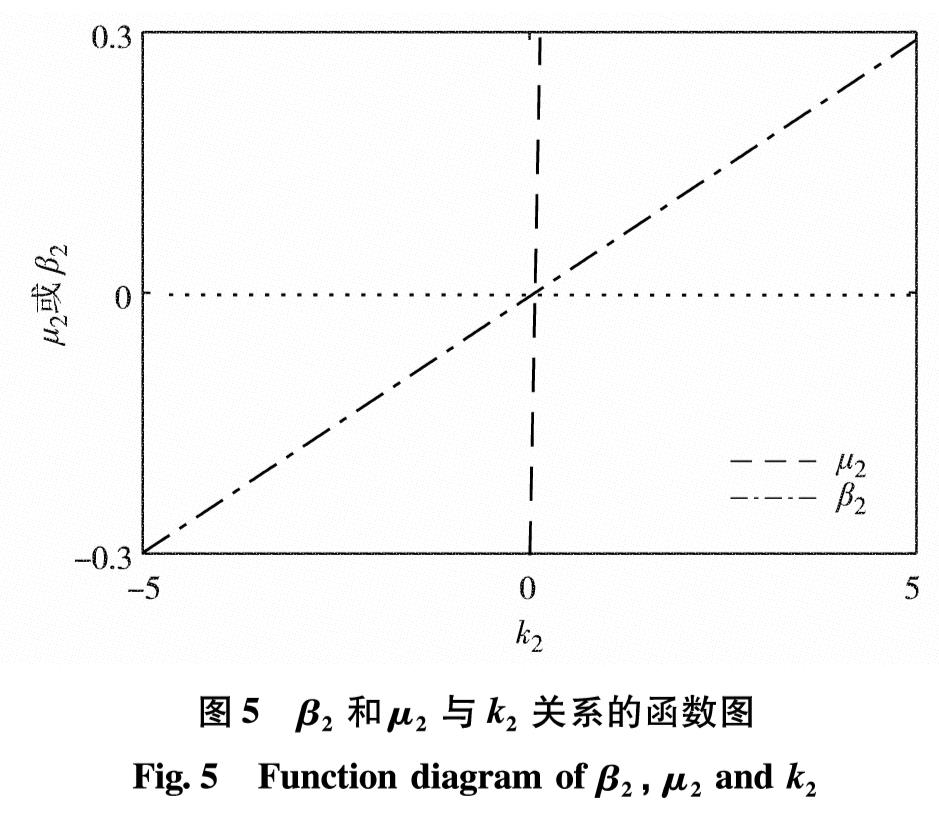
其中, φ'为表1中a=80时φ'(a)对应的实部; 函数β2和μ2关于参数k2的局部关系如图5.
图5 β2和μ2与k2关系的函数图
Fig.5 Function diagram of β2, μ2 and k2
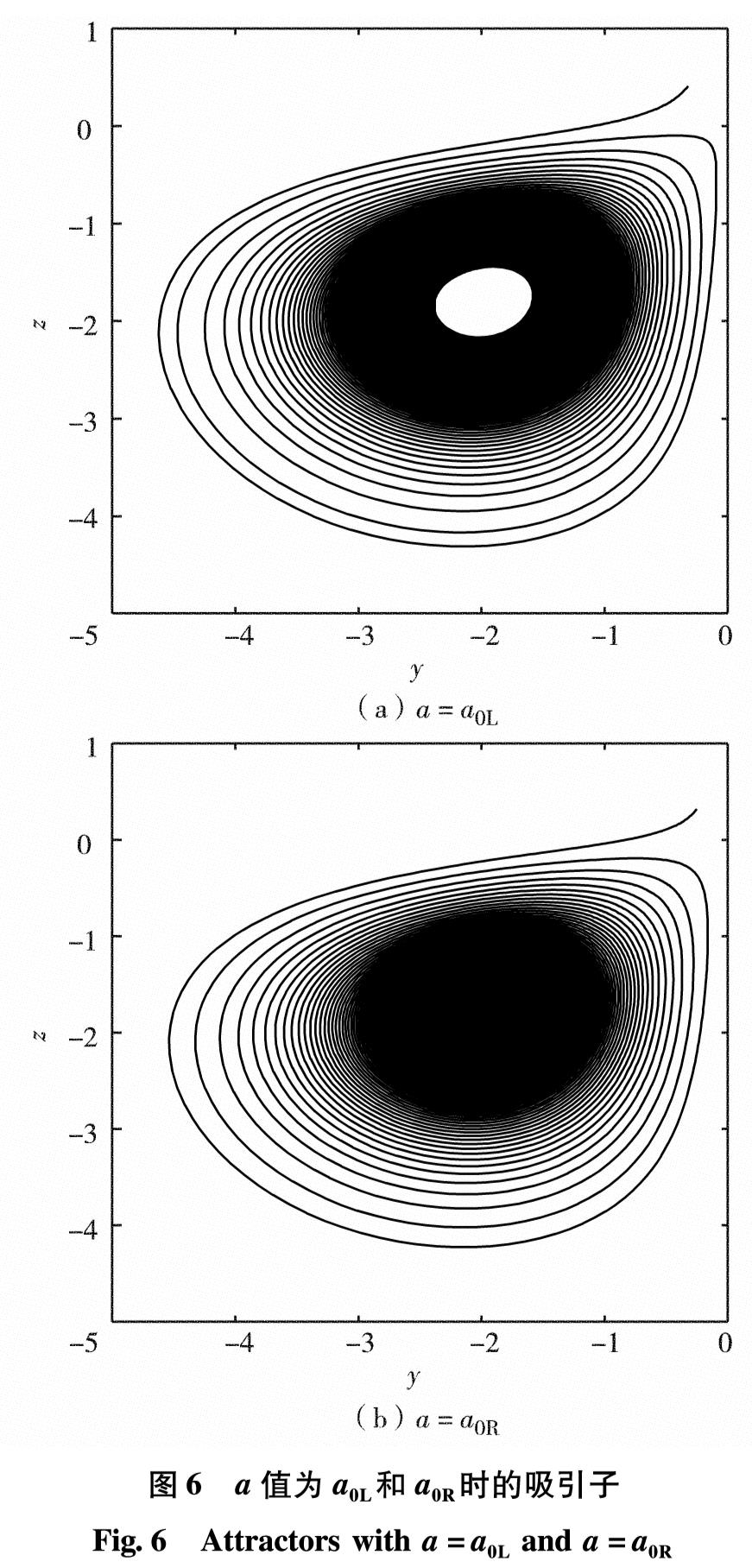
式(30)、式(31)和图5表明,受控系统分岔解的稳定性与分岔方向仅与非线性项的参数k2有关.一般地,为保证Hopf分岔出现稳定的周期解,即保证极限环的稳定性,应取k2<0.070 6. 此时有β2<0和μ2<0, 则受控系统会在a=a0=80处发生超临界的Hopf分岔.分岔方向为a<a0, 即在a0的左侧出现稳定的极限环.现取k2=-0.2, 临界值a0=80的两侧的数值a0L=79.9和a0R=80.1进行仿真,结果如图6.
图6 a值为a0L和a0R时的吸引子
Fig.6 Attractors with a=a0L and a=a0R
图6表明,系统在a0=80时发生Hopf分岔,对比图3可知,Hopf分岔推迟.当a<a0时,系统产生极限环; 当a>a0时,系统轨道稳定于不动点.且对于a<a0,当|a<a0|1时,受控系统的极限环幅值r与分岔参数a和受控参数k2有如式(32)的近似解析关系.

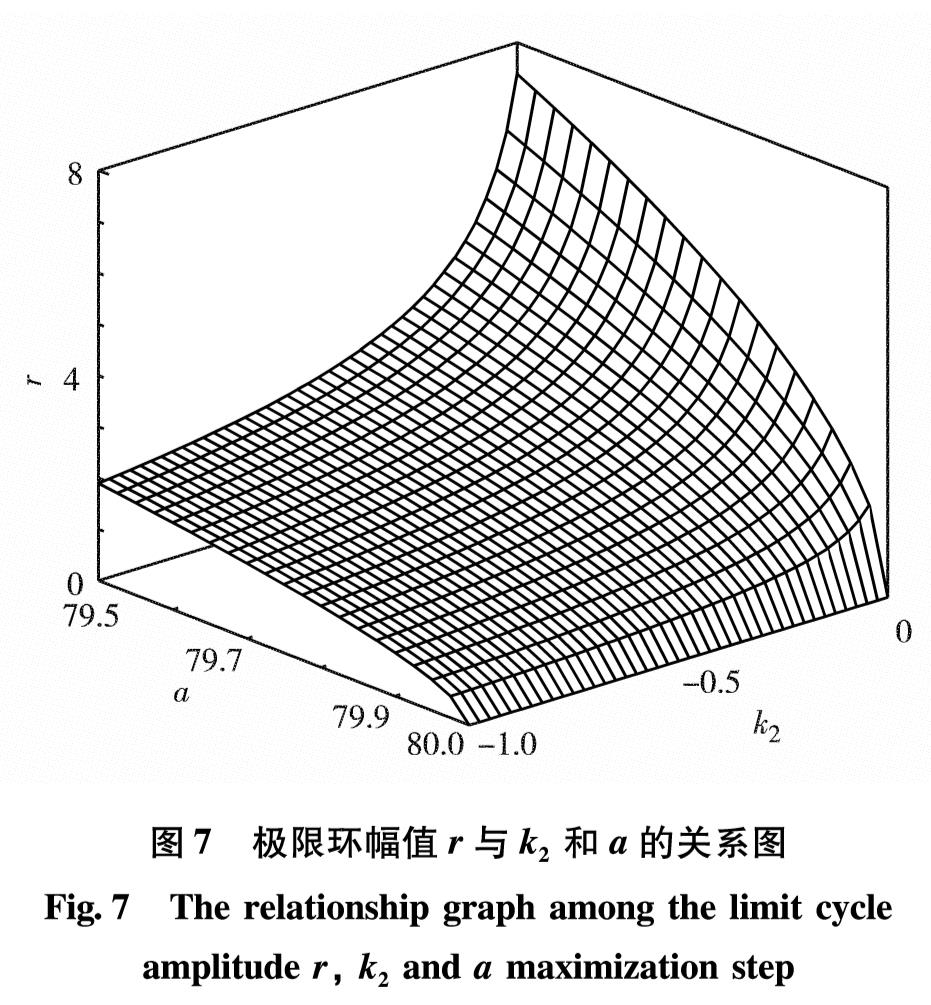
图7给出了式(32)中函数r与参数a和k2的局部函数图.由图7可见,当参数a固定时,极限环的幅值随受控参数k2的增大而增大; 当参数k2固定时,极限环的幅值随分岔参数a的增大而减小.
图8给出了受控系统在不同的k2和a值下产生的极限环.由图8可见,受控参数k2和分岔参数a能够控制极限环的幅值.综上所述,控制器能够改变分岔的临界值,分岔解的稳定性和分岔方向,证明控制器设计合理且可行.
图7 极限环幅值r与k2和a的关系图
Fig.7 The relationship graph among the limit cycle amplitude r, k2 and a maximization step
图8 不同k2和b值下的极限环
Fig.8 Limit cycles with different k2 and b
结 语
提出一个新的四翼混沌系统,通过混沌理论中相关的混沌判据验证了四翼系统的混沌特性.同时设计了一种非线性反馈控制器,实现了对新混沌系统的Hopf分岔控制,通过调控受控参数能够改变系统Hopf分岔的临界点到期望值,控制极限环的稳定性和幅值.