基金项目:山东省重点研发计划资助项目(2017GGX60103); 山东大学基本科研业务费专项资金资助项目(2018JC035)
作者简介:夏德龙(1995—),山东大学硕士研究生.研究方向:物流系统仿真、物流仓储规划等.
中文责编:方 圆; 英文责编:淡 紫
作者简介:夏德龙(1995—),山东大学硕士研究生.研究方向:物流系统仿真、物流仓储规划等.
中文责编:方 圆; 英文责编:淡 紫
DOI: 10.3724/SP.J.1249.2019.06696
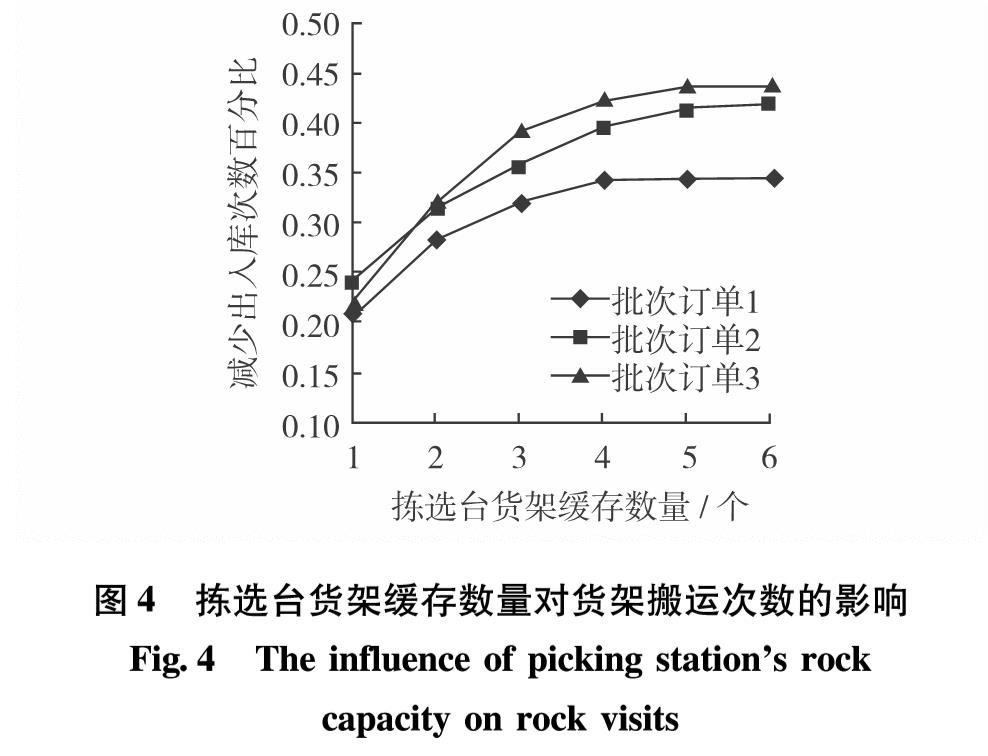
提出一种适用于“货到人”智能机器人系统的订单排序模型,通过优化订单拣选顺序,增加拣选台内相邻订单和拣选台之间订单的共用货架数量,减少货架的搬运次数,提高货架的出入库效率.把订单的排序看作旅行商问题(travelling salesman problem, TSP),并用改进K-Means聚类算法求解该订单排序模型.选取3组不同批次订单进行仿真验证,优化后系统货架搬运次数平均减少35.63%.
In this paper, we propose an order sorting model for the parts-to-picker intelligent robot system. By optimizing the sequence for order picking, the model increases the number of shared racks for orders within adjacent orders and picking stations, reduces the number of transportation times of the racks, thereby improving the efficiency of the warehouse system. Considering the order sequencing as the travelling salesman problem(TSP), we solve the order sorting model by the improved K-Means algorithm. Three sets of different batch orders are selected for simulation verification. After optimization, the transportation times of the system racks are reduced by 35.63% on average.