在试验台架上由驾驶员通过油门踏板传递不同的起步意图,用不同的制动力矩模拟不同路况.试验中,通过重点控制半接合点的精度达到车辆平稳起步的目的.
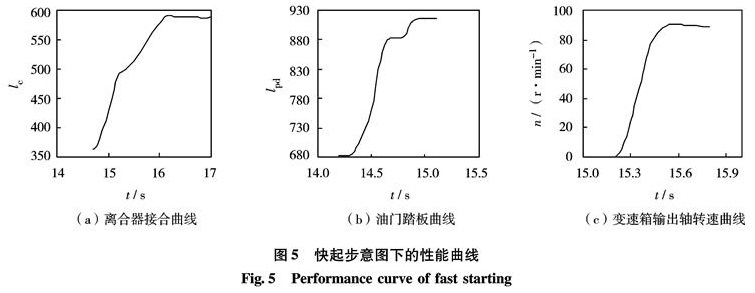
表1与图5—图7体现了驾驶员不同起步意图下离合器接合、油门踏板变化和变速箱输出及离合器半接合点位置情况.图5—图7中lc、lpd和n分别为离合器位移、油门踏板位移和输出轴转速(单位:r/min),lc和lpd为传感器直接读值,单位为任意长度量.在驾驶员表达快起步意图时(图5),油门踏板位移值较大,其变化率也较大,离合器半接合点位于486处.由图5(a)可见,在半接合点附近区域,离合器接合较平顺,冲击较小; 且全部滑磨时间不超过300 ms,变速箱输出轴转速也在300 ms内与输入轴同步, 符合驾驶员快起步意图.
表1 反映起步意图的离合器性能参数
Table 1 Clutch performance parameter of starting intention
图5 快起步意图下的性能曲线
Fig.5 Performance curve of fast starting
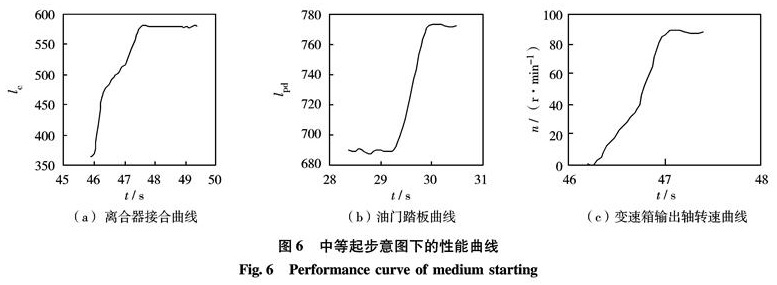
图6 中等起步意图下的性能曲线
Fig.6 Performance curve of medium starting
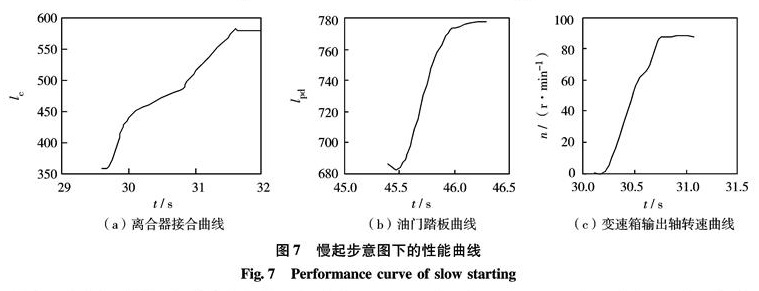
图7 慢起步意图下的性能曲线
Fig.7 Performance curve of slow starting
随着起步速度降低,半接合点的值逐渐减小.其变化范围为设计控制程序带来了一定困难.但慢起步意图下要兼顾离合器的冲击和滑磨,否则容易产生接合冲击.由图6(a)和图7(a)可见,离合器的滑磨时间有所增加,但离合器在半接合点附近接合较快起步意图更平顺,冲击更小,符合驾驶员中速与慢速的起步意图.从各组参数看出,离合器的接合过程完全能够顺应驾驶员的起步意图,调整控制参数,可按驾驶员意图顺利起步.
由于本系统采用霍尔式零速传感器替代了原系统不够灵敏的磁电式传感器,同时采用了模糊控制算法,因此不仅能够实现离合器半接合点的控制顺应驾驶员起步意图顺利起步,还能有效改善离合器的滑磨时间.与原系统相比,该系统在快起步、中速起步和慢起步控制中,离合器的滑磨时间分别减少了80、100和130 ms.与原来没有采用霍尔式零速传感器和用传统的控制方法相比,离合器的整体接合时间分别缩短了100、130和150 ms.离合器滑磨的改善和整体接合时间的缩短减少了离合器的滑磨功,提高了离合器的使用寿命.
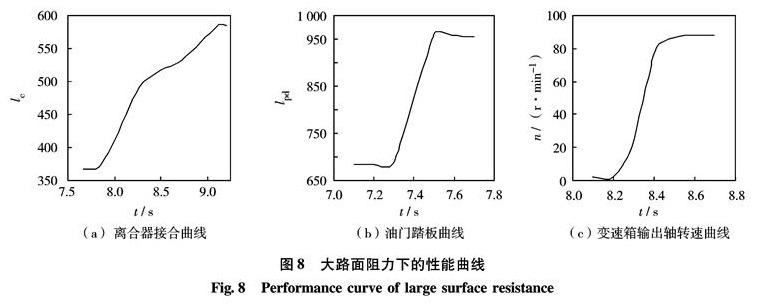
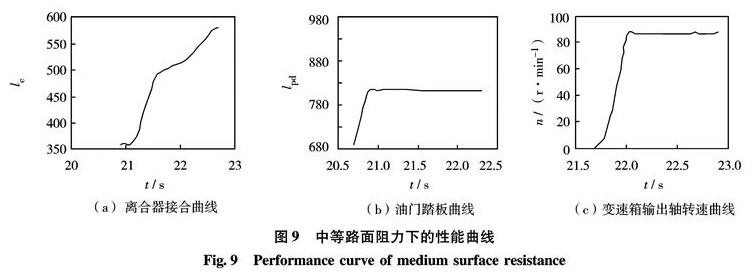
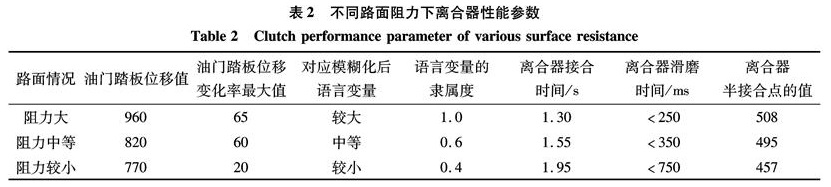
表2与图8—图 10为不同路面阻力下离合器接合、油门踏板变化、变速箱输出及离合器半接合点位置情况.在路面阻力较大时(图8),油门踏板位移值较大,其变化率也较大; 离合器接合速度较高,半接合点的值也较大,位于508处.并且在半接合点附近区域,离合器接合较为平顺,冲击较小; 全部滑磨时间不超过250 ms,有效防止了离合器冲击和磨损.变速箱输出轴转速在250 ms内与输入轴同步.结果表明,对半接合点的控制符合大阻力路面地起步策略.
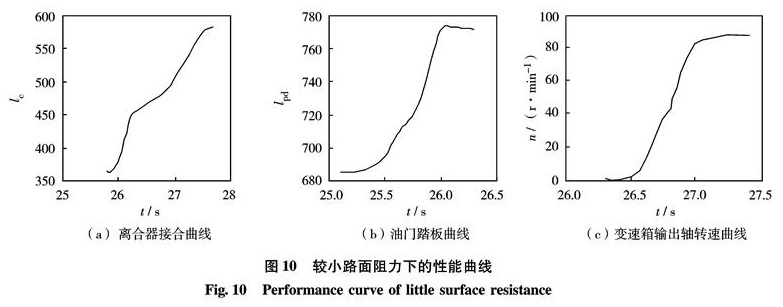
对比图8(a)、图9(a)和图 10(a)可见,随着路面阻力减小,半接合点位置也减小.因此在设计控制程序时,既要考虑大路面阻力下的起步要求,又要兼顾小阻力下的起步要求,否则有可能在小路面阻力情况下产生接合冲击.试验发现,在中等路面阻力和较小路面阻力起步时,离合器接合时间较之大路面阻力下有所增加,但接合更平顺,冲击更小.从各组参数看出,离合器的接合过程完全能够适应不同路面条件的变化,调整控制参数,可以获得良好的起步效果.
图8 大路面阻力下的性能曲线
Fig.8 Performance curve of large surface resistance
图9 中等路面阻力下的性能曲线
Fig.9 Performance curve of medium surface resistance
图 10 较小路面阻力下的性能曲线
Fig.10 Perormance curve of little surface resistance
表2 不同路面阻力下离合器性能参数
Table 2 Clutch performance parameter of various surface resistance