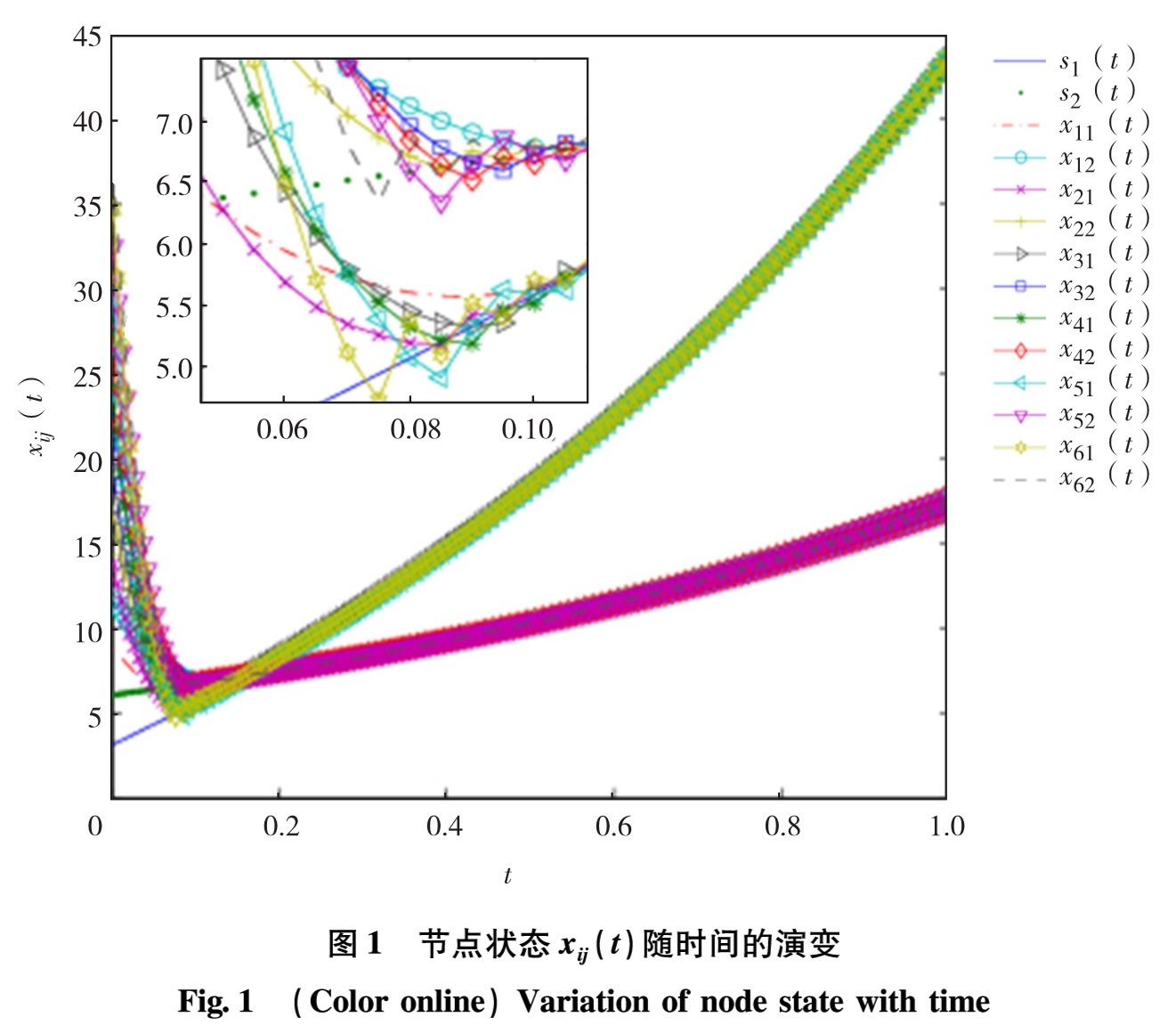
复杂网络的有限时间同步
为实现网络系统(1)在有限时间内同步,需要施加一些控制器ui(t), 这样被控制的网络系统为
x·i(t)=f(t,xi(t), xi(t-τ1(t)))+
c1∑Nj=1aij(rt)×Γxj(t)+
c2∑Nj=1bij(rt)Γxj(t-τ2(t))+ui(t)(5)
记ei(t)=xi(t)-s(t), 根据式(2)和式(5),并注意到 A和 B的性质可得误差系统为
e·i(t)=f(t,xi(t),xi(t-τ1(t)))-
f(t,s(t),s(t-τ1(t)))+
c1∑Nj=1aij(rt)Γej(t)+
c2∑Nj=1bij(rt)Γej(t-
τ2(t))+ui(t), i=1,2,…,N(6)
设计下述形式的控制器
ui(t)=-ξi(r)ei(t)-ki(r)sign(ei(t))|ei(t)|β-
ki(r)(∫tt-τ</sub>1(t)eTi(s)ei(s)ds)(1+β)/2×
((ei(t))/(=ei(t)=2))-ki(r)×
(∫tt-τ</sub>2(t)eTi(s)ei(s)ds)<sup>(1+β)/2((ei(t))/(=ei(t)=2))(7)
其中, ξi(r)>0; ki(r)>0; 0<β<1; sign(·)表示符号函数; |e1(t)|β=(|ei1(t)|β,…,|ein(t)|β)T, sign(e1(t))=diag{sign(ei1(t)),…,sign(ein(t))}.
在控制器(7)的作用下,我们讨论受控系统(6)在原点处的有限时间稳定.以下为本研究所取得的主要结果.
定理1 若函数 f(t, xi(t), xi(t-τ1(t)))满足式(4),且以下不等式成立
{φ+h1-1≤0,
(((ρ+πr+2)IN+)/(2c1γjA(r)-2Ξ(r))c2γjBT(r)
c2γjB(r)-(1-h2)IN)≤0
qp-br≤0, p≠r, p∈S
qp-br≥0, p=r, p∈S(8)
其中, πr=∑p∈S</sup>r</sub>1πrp(qp-br)/qr,(br>0,qr>1); ρ=max1≤j≤n∑nv=1(θ2εjv+φ2εjv+θ2(1-ε)vj); φ=max1≤j≤n∑nv=1(φ2(1-ε)vj); 0<ε<1是任意数; Ξ(r)=diag{ξ1(r),…,ξN(r)}. 则复杂网络(1)在有限时间t*≤t0+(EV<sup> 1-(1+β)/2(t, e(t),r)|t=t0)/(2k(1-(1+β)/2))内同步到式(2),其中, k=min(ki(r)).
【证】对任意的qr>1和r∈S, 选取如下随机Lyapunov-Krasovskii函数
V(t,e(t),r)=qr[∑Ni=1eTi(t)ei(t)+∑Ni=1∫tt-τ</sub>1(t)eTi(s)ei(s)ds+∑Ni=1∫tt-τ</sub>2(t)eTi(s)ei(s)ds](9)
根据伊藤公式,代入式(6)得
LV(t,e(t),r)=2qr∑Ni=1eTi(t)[f(t, xi(t), xi(t-τ1(t)))-f(t, s(t), s(t-τ1(t)))+ui(t)+
c1∑Nj=1aij(r)Γej(t)+c2∑Nj=1bij(r)Γej(t-τ2(t))]+qr∑Ni=1[eTi(t)ei(t)-
(1-τ·1(t))eTi(t-τ1(t))ei(t-τ1(t))]+qr∑Ni=1[eTi(t)ei(t)-
(1-τ·2(t))eTi(t-τ2(t))ei(t-τ2(t))]+
∑p∈Sπrpqp[∑Ni=1eTi(t)ei(t)+∑Ni=1∫tt-τ</sub>1(t)eTi(s)ei(s)ds+∑Ni=1∫tt-τ</sub>2(t)eTi(s)ei(s)ds](10)
由式(4)且注意到,对μ>0, x和y∈R, 0<ε<1有2μ|xy|≤μ2εx2+μ2(1-ε)y2, 则
2qr∑Ni=1eTi(t)[f(t, xi(t), xi(t-τ1(t)))-f(t, s(t), s(t-τ1(t)))]≤
2qr∑Ni=1∑nj=1|eij(t)||fj(t, xi(t), xi(t-τ1(t)))-fj(t, s(t), s(t-τ1(t)))|≤
2qr∑Ni=1∑nj=1∑nv=1θjv|eij(t)||eiv(t)|+2qr∑Ni=1∑nj=1∑nv=1φjv|eij(t)||eiv(t-τ1(t))|≤
qr∑Ni=1∑nj=1∑nv=1(θ2εjv+φ2εjv+θ2(1-ε)vj)e2ij(t)+qr∑Ni=1∑nj=1∑nv=1φ2(1-ε)vje2ij(t-τ1(t))(11)
又因为∑p∈Sπrp=0, 则(∑p∈S</sup>r</sub>1πrp+∑p∈S</sup>r</sub>2πrp)br=0, 式(10)变为
LV(t,e(t),r)≤ρqr∑Ni=1∑nj=1|eij(t)|2+φqr∑Ni=1∑nj=1|eij(t-τ1(t))|2+2c1qr∑Ni=1∑Nj=1aij(r)eTi(t)Γej(t)+
2c2qr∑Ni=1∑Nj=1bij(r)eTi(t)Γej(t-τ2(t))-2qr∑Ni=1eTi(t)ξi(r)ei(t)-
2qr∑Ni=1eTi(t)ki(r)sign(ei(t))|ei(t)|β-2qr∑Ni=1eTi(t)ki(r)(∫tt-τ</sub>1(t)eTi(s)ei(s)ds)<sup>(1+β)/2((ei(t))/(=ei(t)=2))-
2qr∑Ni=1eTi(t)ki(r)(∫tt-τ</sub>2(t)eTi(s)ei(s)ds)<sup>(1+β)/2((ei(t))/(=ei(t)=2))+2qr∑Ni=1eTi(t)ei(t)-
qr(1-h1)∑Ni=1eTi(t-τ1(t))ei(t-τ1(t))-qr(1-h2)∑Ni=1eTi(t-τ2(t))ei(t-τ2(t))+
∑p∈Sπrpqp[∑Ni=1eTi(t)ei(t)+∑Ni=1∫tt-τ</sub>1(t)eTi(s)ei(s)ds)+∑Ni=1∫tt-τ</sub>2(t)eTi(s)ei(s)ds)]≤
qr(φ+h1-1)∑Nj=1(~overe)Tj(t-τ1(t))(~overe)j(t-τ1(t))+qr(~overe)T(t)×
((ρ+πr+2)IN+2c1γjA(r)-2Ξ(r)c2γjBT(r)
c2γjB(r)-(1-h2)IN)×(~overe)(t)-
2kqr(∑Ni=1∑nj=1|eij(t)|1+β)-2kqr∑Ni=1(∫tt-τ</sub>1(t)eTi(s)ei(s)ds)(1+β)/2-
2kqr∑Ni=1(∫tt-τ</sub>2(t)eTi(s)ei(s)ds)(1+β)/2+∑p∈S</sup>r</sub>2πrp(qp-br)∑Ni=1eTi(t)ei(t)+
∑p∈Sπrp(qp-br)[∑Ni=1∫tt-τ</sub>1(t)eTi(s)ei(s)ds+∑Ni=1∫tt-τ</sub>2(t)eTi(s)ei(s)ds].(12)
此处(~overe)j(t)=(e1j(t),e2j(t),…,eNj(t))T,(~overe)(t)=((~overe)j(t)
(~overe)j(t-τ2(t))).注意到条件(8),在式(12)两端取期望可得
E[LV(t, e(t),r)]≤
E(-2kqr(∑Ni=1∑nj=1|eij(t)|1+β+
∑Ni=1(∫tt-τ</sub>1(t)eTi(s)ei(s)ds)(1+β)/2+
∑Ni=1(∫tt-τ</sub>2(t)eTi(s)ei(s)ds)(1+β)/2))(13)
由引理2可得
(∑Ni=1∑nj=1|eij(t)|1+β)1/(1+β)≥(∑Ni=1∑nj=1|eij(t)|2)1/2,
则式(13)可改写为
E[LV(t,e(t),r)]≤-2k(EV(t, e(t),r))(1+β)/2.
由引理1知, E(V(t, e(t),r))在有限时间内趋于0,同时可估计同步时间的上界为
t*≤t0+(EV1-(1+β)/2(t, e(t),r)|t=t0)/(2k(1-(1+β)/2)).
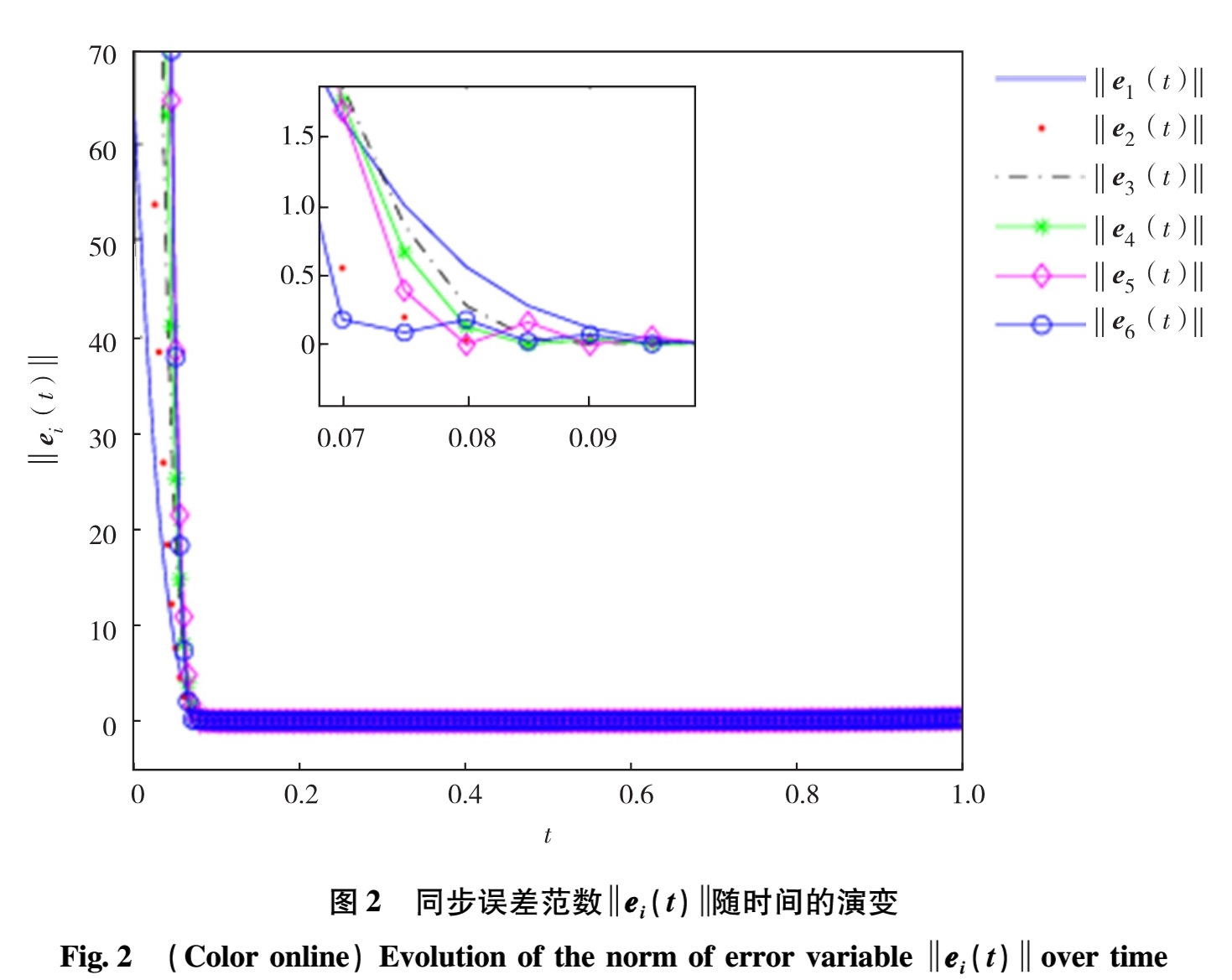
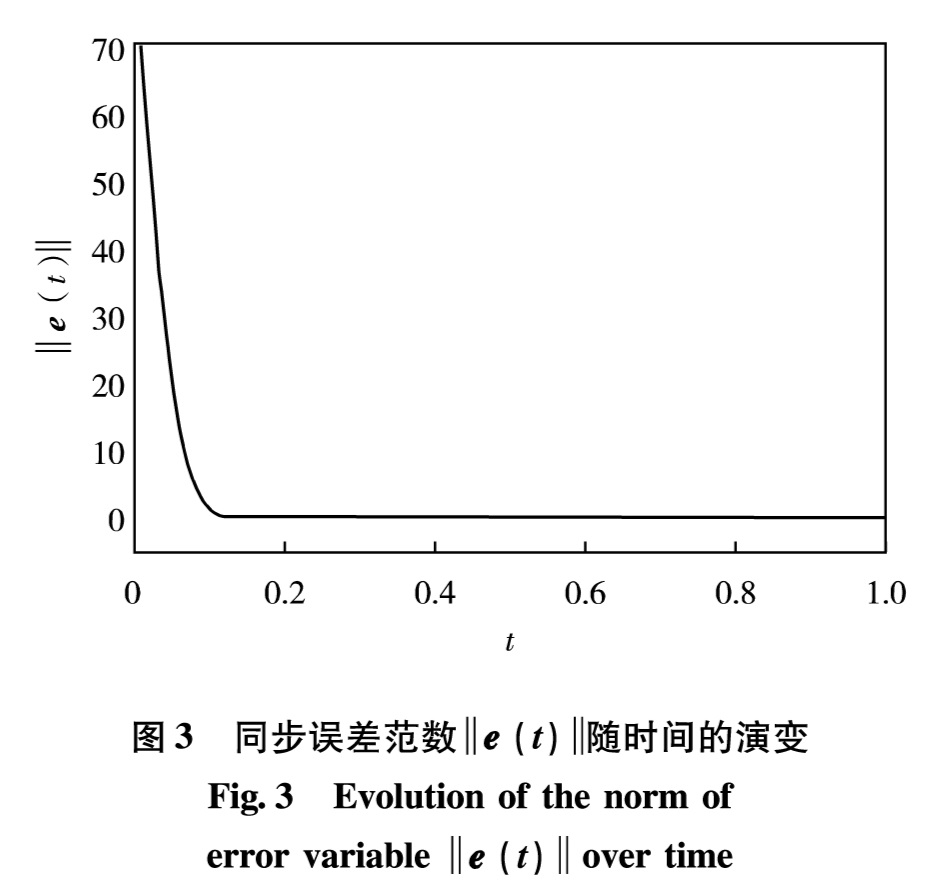
因此,误差向量 ei(t),i=1,2,…,N在时间t*内将会趋于0.此定理得证.
当内部时滞与耦合时滞都等于零时,相应的系统为
x·i(t)=f(t, xi(t))+c1∑Nj=1aij(rt)Γxj(t)(14)
其孤立节点的方程为
s·(t)=f(t, s(t))(15)
设计控制器为
ui(t)=-ξi(r)ei(t)-
ki(r)sign(ei(t))|ei(t)|β(16)
由此可得如下推论.
推论1 若假设1成立,且
{(ζ+πr)IN+2c1γjA(r)-2Ξ(r)≤0
qp-br≤0, p≠r, p∈Sr2
qp-br≥0, p=r, p∈Sr2(17)
其中, πr=∑p∈S</sup>r</sub>1πrp(qp-br)/qr,(br>0, qr>1), ζ=max1≤μ≤n∑nv=1(θ2εμv+θ2(1-ε)vμ), 0<ε<1是任意数.则复杂网络(14)在控制器(16)的作用下同步到式(15), 其中, Ξ(r)与k的定义与定理1相同.
注2 推论1的证明方法与定理的主要区别在于构造的Lyapunov-Krasovskii函数不同,推论中令V(t, e(t), r)=qr∑Ni=1eTi(t)ei(t), 由于证明过程类似,在此忽略.
注3 定理1讨论了内部时滞与耦合时滞共存这类更符合实际的情形,如果令τ1(t)=0或者τ2(t)=0, 即仅考虑耦合时滞[15]或者内部时滞[18],那么对应改变设计的控制器即可,所以此处所得的结果推广了现有文献[15,18]的相关结果.