假设ATT和目标鱼雷航速恒定,分别为30和20 m/s,初始视线高低角x1(0)=5π/180 rad,初始距离R=1 km,ATT初始航向角φm(0)=π/4 rad,目标鱼雷初始航向角φt(0)=π rad,根据式(1)可计得视线角速度初始值x2(0)=-0.017 5 rad/s,并取c=2. 考虑到工程应用中,控制量uq是由uq=(cR-2R·)x2-R·s+εs/(|s|+δ)中各系统状态变量参数的测量值计算而来,难免存在测量误差,因此在仿真中假设uq的计算中各参数存在20%的随机相对误差,即令
uq=[cR×ran(t)-2R·×ran(t)]x2×
ran(t)-R·×s×ran(t)+εs/(|s|+δ)(18)
其中, ran(t)=1+0.2×random(t), random(t)为t时刻在[-1,1]内随机产生的量.
设步长τ=1 ms,仿真时间t=25 s,采用Runge Kutta法求解方程组(17). 在仿真中,令φ·t=0时的模拟目标鱼雷作直线运动,并以φt(0)分别为π rad和5π/6 rad时进行仿真,令φ·t≠0时模拟目标鱼雷作蛇形机动,通过方程组(17)的解绘制弹道,以验证ATT能否精确命中目标鱼雷,即验证本研究所设计的变结构纵向拦截导引律的制导性能.仿真结果如下:
1)目标鱼雷不作机动,即φ·t=0时,ATT能精确命中目标,如图2至图5.
图2 目标不作机动时ATT与目标间的视线高低角
Fig.2 Line-of-sight elevation angle between ATT and target when target does not maneuver
图3 目标不作机动时ATT的航向角φm
Fig.3 Heading angle of ATT φm when target does not maneuver
图4 目标不作机动时控制量uq变化曲线
Fig.4 Waveform of controller uq when target does not maneuver
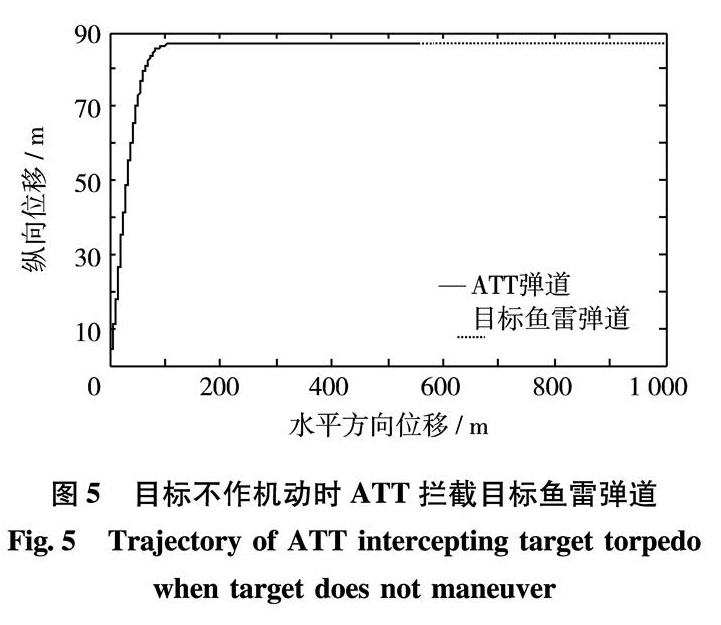
图5 目标不作机动时ATT拦截目标鱼雷弹道
Fig.5 Trajectory of ATT intercepting target torpedo when target does not maneuver
由图2可见,目标鱼雷在纵向不作机动时,ATT与目标鱼雷的视线高低角在控制器uq作用下,过渡到零角度并保持不变,说明uq能够将ATT与目标鱼雷的视线高低角控制为零,达到控制目的.由图5可见,ATT航向角与目标鱼雷航向角相差180°,ATT与目标鱼雷弹道过渡到同一水平面后,两者保持在同一水平面,在导引律的控制下ATT与目标直接碰撞.由于在仿真计算中增加了测量参数的随机误差,uq出现间断的抖振.图2至图5表明,参数随机误差不影响系统的稳定性,这说明本研究设计的导引律具有强鲁棒性.
2)当目标鱼雷不作机动,取初始航向角为φt(0)=5π/6 rad时,ATT同样能精确命中目标鱼雷,见图6至图9.
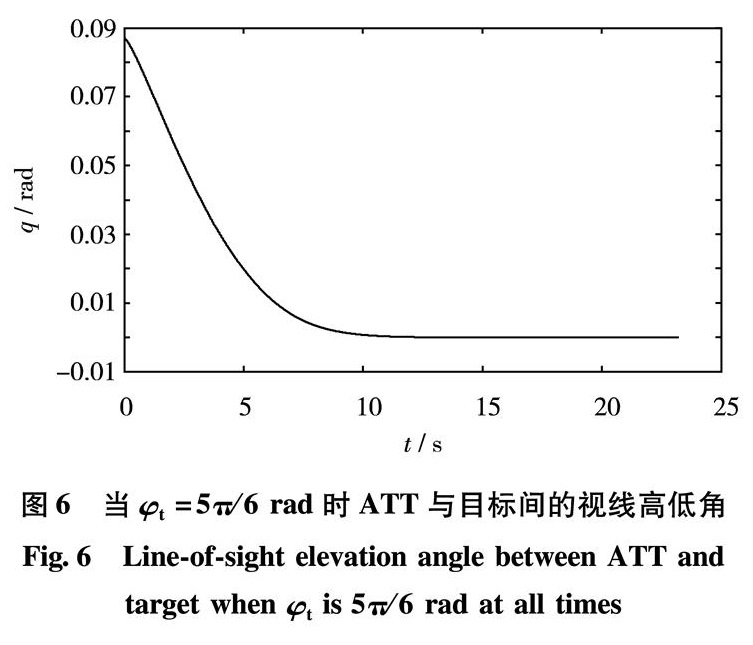
图6 当φt =5π/6 rad时ATT与目标间的视线高低角
Fig.6 Line-of-sight elevation angle between ATT and target when φt is 5π/6 rad at all times
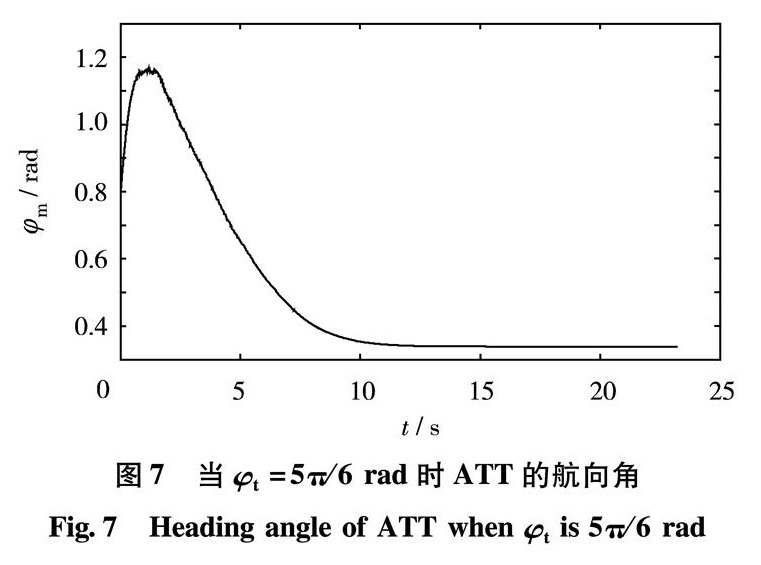
图7 当φt =5π/6 rad时ATT的航向角
Fig.7 Heading angle of ATT when φt is 5π/6 rad
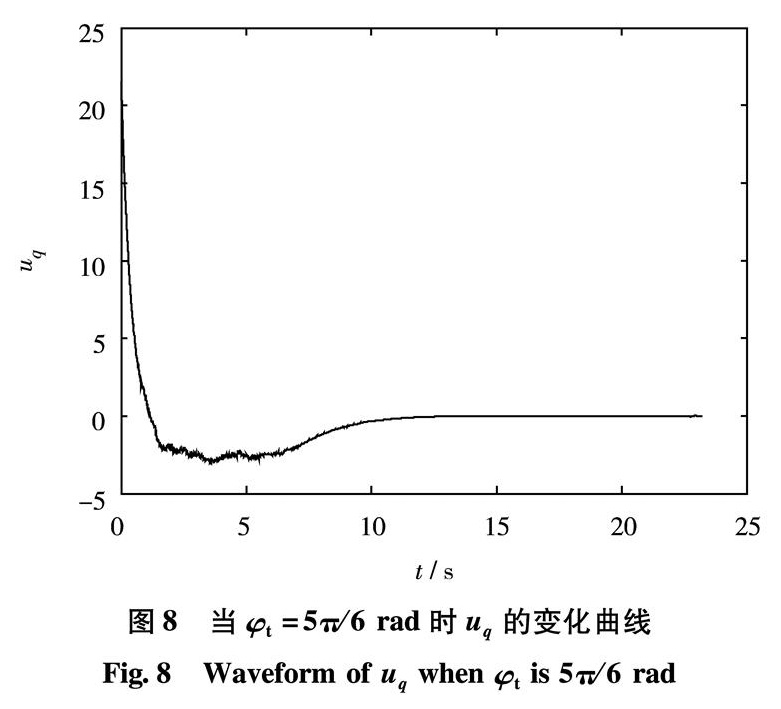
图8 当φt =5π/6 rad时uq的变化曲线
Fig.8 Waveform of uq when φt is 5π/6 rad
图9 当φt =5π/6 rad时ATT拦截目标鱼雷弹道
Fig.9 Trajectory of ATT intercepting target torpedo when φt is 5π/6 rad
当目标鱼雷不作机动,航向不在水平面内,即目标雷达与水平面成φt(0)=5π/6 rad角时,由图6可知,ATT与目标鱼雷的视线高低角在控制器uq作用下过渡到零角度并保持不变,此时ATT航向角也保持不变,图7和图8分别绘制了控制器uq和ATT航向角的关系曲线图,可见控制器和ATT航向角均不存在大的抖振,说明工程可实现.由图9可见,ATT在纵向精确命中了目标鱼雷.验证了本研究设计的导引律能精确命中目标鱼雷的结论.
3)目标鱼雷在纵向作蛇形机动,取
φ·t={cos t, t<3π
0, t≥3π
模拟目标机动,ATT在导引律控制下能精确命中目标鱼雷,见图 10至图 13.
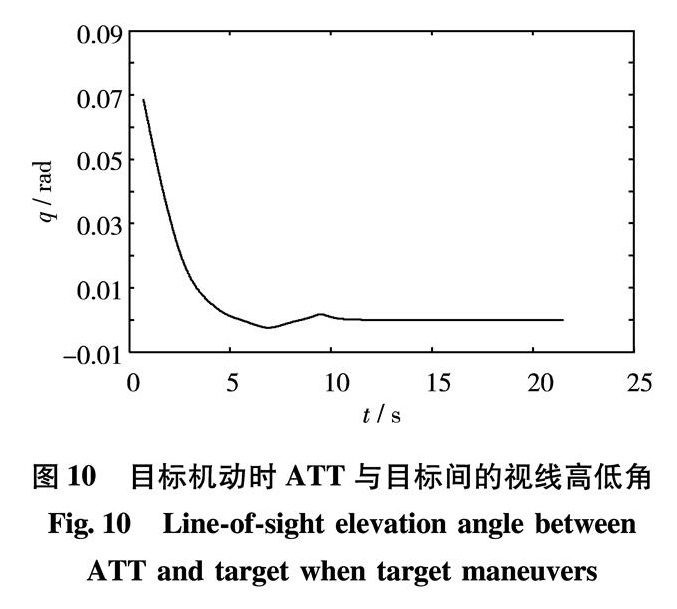
图 10 目标机动时ATT与目标间的视线高低角
Fig.10 Line-of-sight elevation angle between ATT and target when target maneuvers
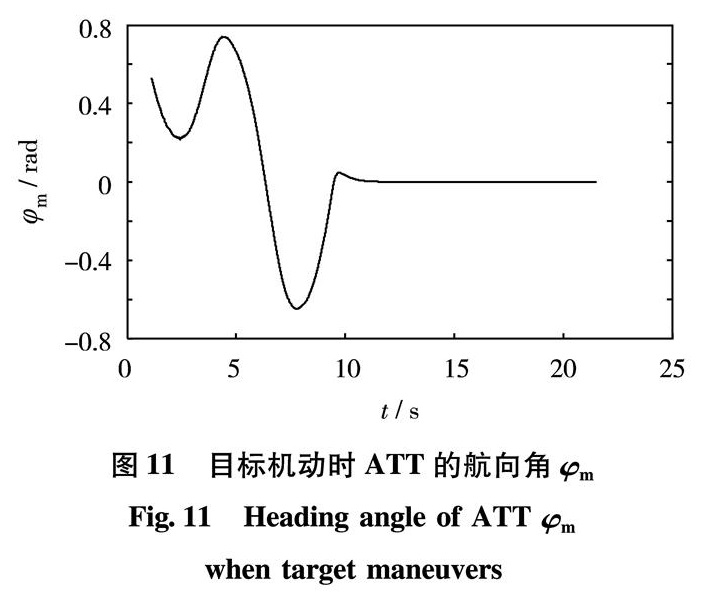
图 11 目标机动时ATT的航向角φm
Fig.11 Heading angle of ATT φm when target maneuvers
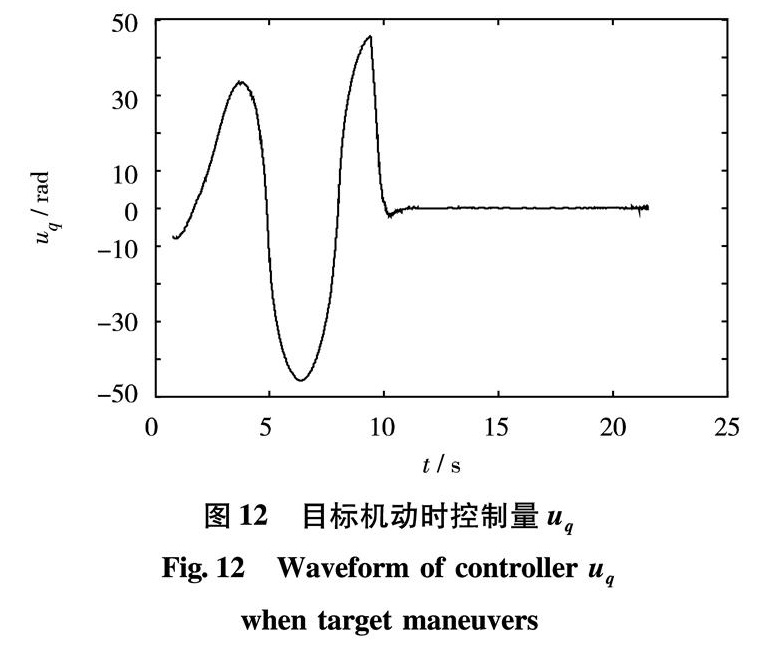
图 12 目标机动时控制量uq
Fig.12 Waveform of controller uq when target maneuvers
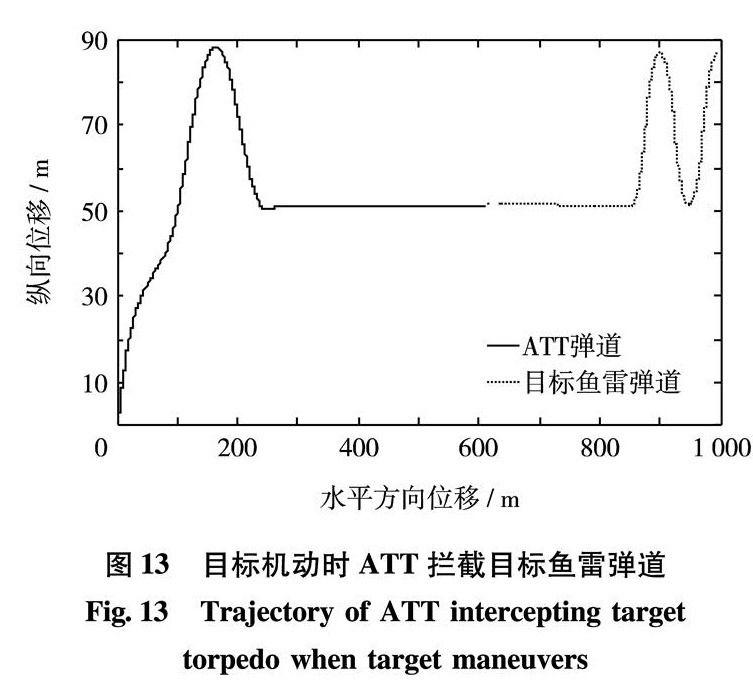
图 13 目标机动时ATT拦截目标鱼雷弹道
Fig.13 Trajectory of ATT intercepting target torpedo when target maneuvers
当目标鱼雷作机动时,由图 10可见,ATT与目标鱼雷的视线高低角在控制器作用下过渡到零角度,当目标机动时,在零角度附近有一个极小邻域波动; 当目标不作机动时,保持在零角度.图 11和图 12分别绘制了ATT航向角和控制器uq的关系曲线图,uq和ATT航向角曲线平稳光滑,不存在抖振,说明本研究设计的导引律的工程可实现性.由图 13可见,ATT与目标鱼雷视线高低角能够被控制在零角度,且ATT精确命中目标.
以上仿真结果表明,在控制器uq=(cR-2R·)x2-R·s+εs/(|s|+δ)的作用下,ATT与目标鱼雷视线高低角过渡零角度,并稳定在零角度,且当目标鱼雷机动时也能保持这一特性,说明本研究设计的导引律对目标机动具有强鲁棒性.从ATT拦截目标鱼雷弹道可知,ATT能精确命中目标鱼雷,并使ATT与目标鱼雷视线高低角控制在零角度,这也证明了所设计的纵向拦截导引律将视线高低角控制在零角度.